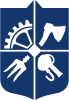
Flexible manipulator with remote control contains a chain of interconnected movable elements in series, each of which has a cup-shaped body made of dielectric material with a spherical convex part on the side of the previous element and a convex part on the side of the next element, petal segments and an axial hole. The working surfaces of these elements interacting with the next element contain metal plates, and the working surfaces interacting with the previous element contain electromagnets. Spherical contacts are provided on the sides of the spherical parts of the element body. Inside the element body is a control unit containing a power supply, a microprocessor, microcontrollers in the number corresponding to the number of petal segments, and a wireless signal receiving module. In the center of the body of each element there are axial holes, on each side of which there are conical holes. The axial holes have contact bushings through which a metal cable passes. The contact sleeve is used to supply power to the control unit through the cable and spherical contacts, and to the electromagnets through the control unit.
