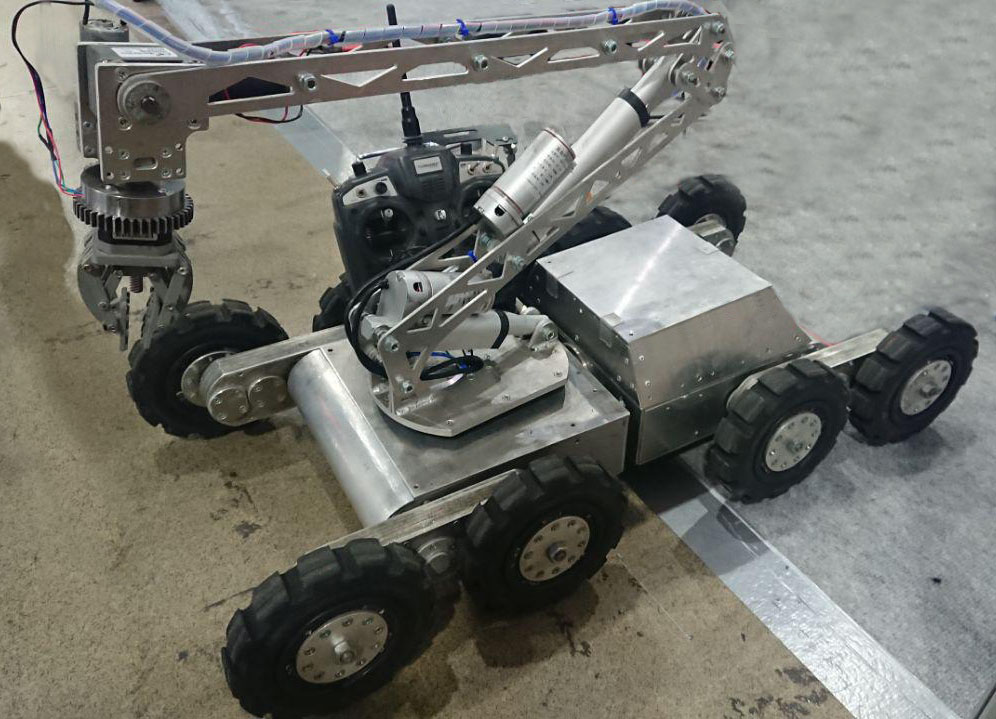
Спроєктовано мобільний роботизований комплекс на базі шасі підвищеної прохідності з колісно-крокуючим двокотковим рушієм (шасі класу 8К4П). Обраний тип рушія дозволяє шасі долати співвимірні з його габаритами перешкоди. Комплекс обладнано системою дистанційного керування та маніпулятором з шістьма ступенями свободи.
Ринкова та економічна привабливість
- Мобільний роботизований комплекс може бути використаний при створенні рухомих мереж зв’язку чи при ремонті різноманітних інженерних мереж, також при виконанні завдань, які є небезпечними для життя чи здоров’я людини (ліквідація різноманітних аварій, наслідків надзвичайних ситуацій, робота в небезпечних середовищах).
- Даний комплекс, у порівнянні з роботами на гусеничному шасі, має меншу вагу, більшу швидкість та ресурс, є більш економічним як при виготовленні, так і при експлуатації. У порівнянні з роботами на колісному шасі, спроєктований комплекс має вищу прохідність за рахунок колісно-крокуючої схеми рушія. В цілому, проектування здійснено з урахуванням необхідності здешевлення виробництва завдяки зниженню матеріалоємності та використання стандартних деталей та вузлів.
Основні переваги (сильні сторони) розробки
- Проєктування мобільного шасі здійснюється виключно за результатами аналітичного та чисельного моделювання його динаміки при доланні різноманітних типових перешкод;
- Для найбільш навантажених та відповідальних деталей приводу проводиться розрахунок на міцність за сучасними методиками;
- Програми розрахунку сформовані у вигляді єдиного та зручного для користування пакету, який дозволяє суттєво скоротити час на проєктування та оптимізацію колісних/колісно-крокуючих шасі для роботизованих систем та їх приводів;
- Розроблено новий метод визначення координат місцезнаходження шасі з використанням системи технічного зору, яка дає можливість створення автономної навігаційної системи, в т.ч. для її використання у польових умовах;
- Застосовується вдосконалений алгоритм роботи системи технічного зору на основі контурного аналізу.
- Наявні робочі кресленики на мобільне шасі з колісно-крокуючим двокотковим рушієм та з маніпулятором на шість ступенів свободи. Виготовлено прототип мобільного шасі, який протестований на низці перешкод (наявні відеоматеріали результатів іспитів). На дослідному зразку відпрацьована технологія його виготовлення, що свідчить про готовність впровадження розробки у виробництво. Спроєктовано також і знаходиться на етапі виготовлення мобільне шасі з колісно-крокуючим трикотковим рушієм (колісна формула 12К4П).
Стан готовності
- Наявні робочі кресленики на мобільне шасі з колісно-крокуючим двокотковим рушієм та з маніпулятором на шість ступенів свободи. Виготовлено прототип мобільного шасі, який протестований на низці перешкод (наявні відеоматеріали результатів іспитів). На дослідному зразку відпрацьована технологія його виготовлення, що свідчить про готовність впровадження розробки у виробництво. Спроєктовано також і знаходиться на етапі виготовлення мобільне шасі з колісно-крокуючим трикотковим рушієм (колісна формула 12К4П).
- Розроблено пакет програм розрахунку динаміки колісно-крокуючих шасі, за допомогою якого можуть бути визначені оптимальні геометричні розміри його елементів, енерго-кінематичні параметри привода залежно від масогабаритних характеристик корисного обладнання та передбачуваних розмірів долаємих перешкод.
- Відкритими залишилися окремі питання, які пов’язані з системою керування мобільним шасі та орієнтуванням його на місцевості на основі системи технічного зору.
Інформація про розробників
Що потрібно для просування розробки
- Договори із зацікавленими сторонами.